| |

What is contact Mechanics?The study of the deformation of solids that touch each other at one or more locations is known as contact mechanics. Shear stress and normal stress, which operate tangentially and perpendicularly to the surfaces of the contacting bodies, respectively, are two fundamental differences in contact mechanics. Normal stresses resulting from applied normal forces and from the adhesion existing on surfaces in close contact, even if they are clean and dry, are the main subject of normal contact mechanics, also known as frictionless contact mechanics. The impact of friction forces is highlighted in frictional contact mechanics. The field of mechanical engineering includes contact mechanics. The subject is formulated physically and mathematically using continuum mechanics and the mechanics of materials, with an emphasis on calculations involving elastic, viscoelastic, and plastic entities in static or dynamic contact. For the study of tribology, contact stiffness, electrical contact resistance, and indentation hardness, as well as for the safe and energy-efficient design of technical systems, contact mechanics gives the knowledge that is required. Applications for contact mechanics include tire-rail contact in locomotives, coupling devices, braking systems, combustion engines, mechanical linkages, gasket seals, metalworking, metal forming, ultrasonic welding, electrical contacts, and many more. Stress analysis of contact and coupling elements, as well as the impact of lubrication and material design on friction and wear, may be current difficulties in the subject. Contact mechanics has additional uses in the fields of micro- and nanotechnology. With the publication of Heinrich Hertz's paper "On the contact of elastic solids" ("Ueber die Berührung fester elastischer Körper") in 1881, contact mechanics as we know it today got its start. Hertz was striving to comprehend how the force holding together multiple, stacked lenses may alter their optical characteristics. The localized strains that emerge when two curved surfaces come into contact and gradually flex due to applied loads are referred to as hertzian contact stress. The elasticity of the substance in contact will determine how much deformation occurs. It provides the contact stress as a function of the normal contact force, the bodies' bending radii, and their respective elastic moduli. Equations for load carrying capacity and fatigue life in bearings, gears, and other bodies where two surfaces are in touch are built on the Hertzian contact stress concept. HistoryHeinrich Hertz is well known for developing classical contact mechanics. Hertz found a solution to the contact issue between two elastic bodies with curved surfaces in 1882. The foundation for current contact mechanics issues is provided by this historically significant solution. For instance, Hertzian contact stress in mechanical engineering and tribology is a description of the tension within mating parts. The stress around the point of contact between two spheres with differing radii is typically referred to as the Hertzian contact stress. Johnson, Kendall, and Roberts didn't come up with a comparable remedy for sticky contact until over a century later. In the 1970s, Boris Derjaguin and colleagues proposed a new hypothesis of adhesion, which was rejected by them. The Johnson et al. model for adhesive elastic contact became known as the JKR (after Johnson, Kendall, and Roberts), while the Derjaguin model became known as the DMT (after Derjaguin, Muller, and Toporov) model. This rejection served as a crucial building block for the Tabor and later Maugis criteria, which rank the JKR and DMT contact models' ability to accurately simulate adhesive contact for various materials. Mid-twentieth-century developments in contact mechanics can be credited to individuals like Bowden and Tabor. The significance of surface roughness for bodies in touch was initially brought up by Bowden and Tabor. The genuine contact area between friction partners is discovered to be less than the apparent contact area by study of the surface roughness. Such knowledge also fundamentally altered the course of tribology projects. Several ideas in contact mechanics of rough surfaces have been developed from the studies of Bowden and Tabor. Discussion of ground-breaking works in this subject must also include the contributions of Archard (1957). Archard came to the conclusion that the contact area is roughly proportional to the normal force even for rough elastic surfaces. Additional significant contributions in this direction came from Greenwood and Williamson (1966), Bush (1975], and Persson (2002). The primary conclusions of these studies were that, while the parameters of individual micro-contacts (such as pressure and micro-contact size) are very weakly dependent upon the load, the real contact surface in rough materials is often proportional to the normal force. The Dimensionality Reduction MethodThe Method of Dimensionality Reduction (MDR) can be used to resolve some contact issues. This method substitutes a body's contact with a linear elastic or viscoelastic basis for the initial three-dimensional system. If the form of the bodies is altered and the components of the foundation are defined in accordance with the MDR's criteria, the properties of one-dimensional systems perfectly match those of the original three-dimensional system. The foundation of MDR is the solution to axisymmetric contact problems discovered by Ludwig Föppl and Gerhard Schubert in 1941 and 1942, respectively. 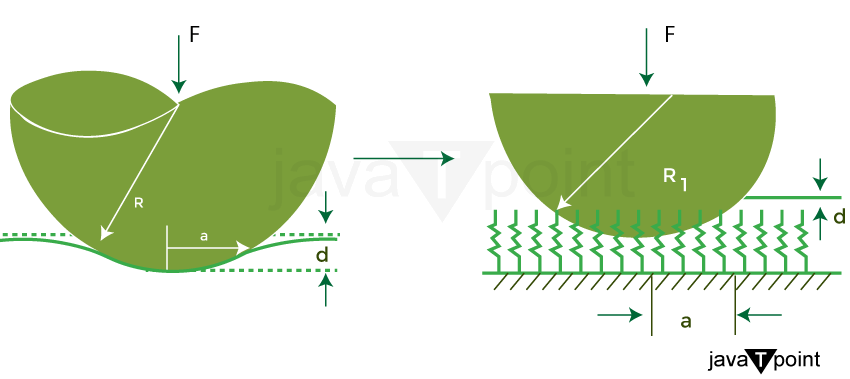
The non-adhesive elastic contact theory of HertzianThe classical theory of contact emphasized non-adhesive contact, which may be separated from without adhesion forces since no tension force is allowed to exist within the contact area. Contact issues that satisfy the no-adhesion criteria have been solved using a variety of analytical and numerical methods. When two bodies interact, complex forces and moments are transferred between them, making contact mechanics issues highly complex. The contact stresses typically follow a nonlinear relationship with the deformation as well. Typically, a frame of reference is established in which the objects-which may be in motion relative to one another-are static to streamline the solution process. At their interface, they communicate through surface tractions (or pressures/stresses). Premises in the Hertzian theoryWhen figuring out the answers to Hertzian contact problems, the following presumptions are made:
When some or all these presumptions are broken, further issues develop, and these contact issues are typically referred to be non-Hertzian. Techniques for analytical solutionsBased on the geometry of the region of contact, analytical solution approaches for non-adhesive contact problems can be divided into two categories. Before any deformation occurs, a conforming contact is one in which the two bodies touch several times (i.e., they "fit together"). A non-conforming contact is one where the forms of the bodies are sufficiently different that they only make contact at one place (or potentially along a line) when there is no load. In the non-conforming example, the stresses are heavily concentrated in the limited contact area compared to the sizes of the objects. In the absence of such a touch, it is referred to as diverse. 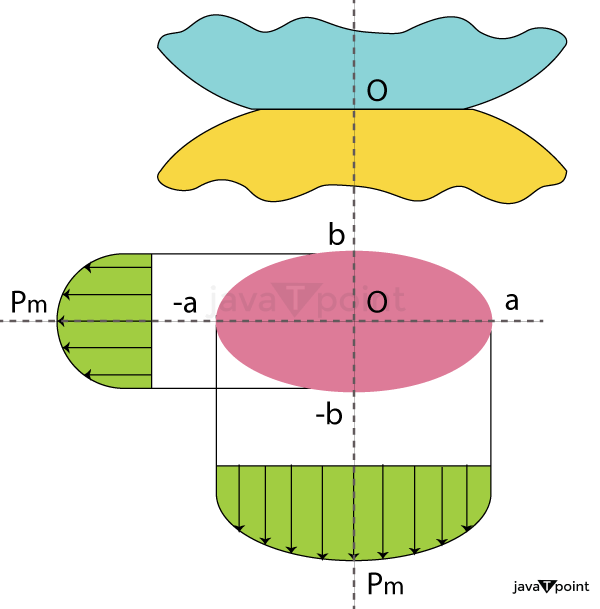
Rubbing of two rough surfacesThe genuine contact area, A, that is created when two bodies with rough surfaces are forced together is substantially smaller than the apparent or nominal contact area, A0. Normal contact mechanics and static frictional interactions are used to analyze the mechanics of contacting rough surfaces. Surface patterns that exhibit self-affinity, also known as surface fractality, on a wide variety of length scales down to the molecular level are typical of natural and engineered surfaces that display roughness traits known as asperities. It is acknowledged that the genuine contact area linearly scales with applied pressure is caused by the self-affine structure of surfaces. This frequently noticed linearity between contact area and pressure can also be thought of as the source of the linearity of the connection between static friction and applied normal force, using a model of shearing welded contacts in tribological interactions. Contact between elastic substances that is adhesiveVan der Waals forces are attractive and occur when two solid surfaces are brought together. It is possible to determine the tensile force between two rigid spheres with flawlessly smooth surfaces using Bradley's van der Waals model. The Hertzian model of contact does not allow for the possibility of adhesion. However, when the Hertz theory was compared to experiments involving contact between rubber and glass spheres, various discrepancies were found in the late 1960s.
This demonstrated the presence of sticky forces. The earliest models to include adhesion in Hertzian contact were the Derjaguin-Muller-Toporov (DMT) and Johnson-Kendall-Roberts (JKR) models.
Next TopicWhat is Fluid Mechanics
|
 For Videos Join Our Youtube Channel: Join Now
For Videos Join Our Youtube Channel: Join Now
Feedback
- Send your Feedback to [email protected]
Help Others, Please Share








